Welcome to Our Lab.
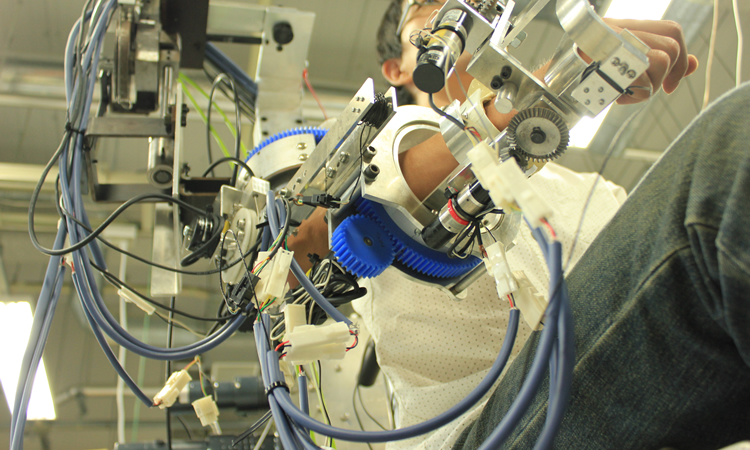
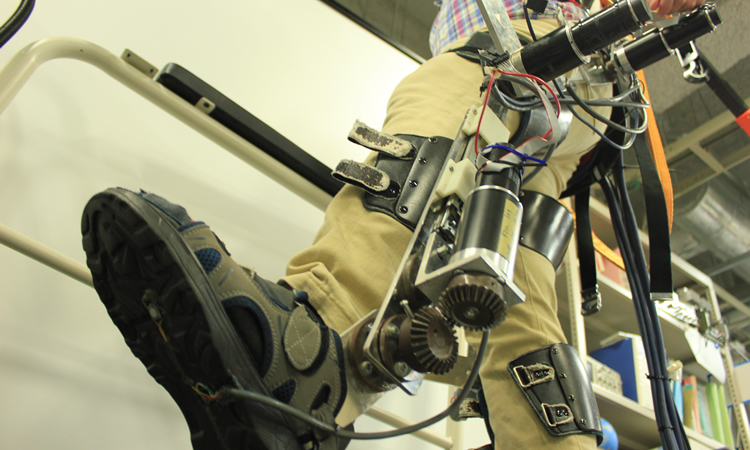
システム工学研究室では,ロボット・システムを医療・福祉・スポーツへ応用するための研究開発に取り組んでいます.ロボット工学は,機構,制御,センサ,ソフトウェアなど様々な技術が集合した領域です.このような技術を人間,生活を対象とする場へ応用するときには,従来の産業技術を超えた新たな工夫を必要としています.



システム工学研究室では,ロボット・システムを医療・福祉・スポーツへ応用するための研究開発に取り組んでいます.ロボット工学は,機構,制御,センサ,ソフトウェアなど様々な技術が集合した領域です.このような技術を人間,生活を対象とする場へ応用するときには,従来の産業技術を超えた新たな工夫を必要としています.