



Welcome to System Engineering Lab in Kyushu University
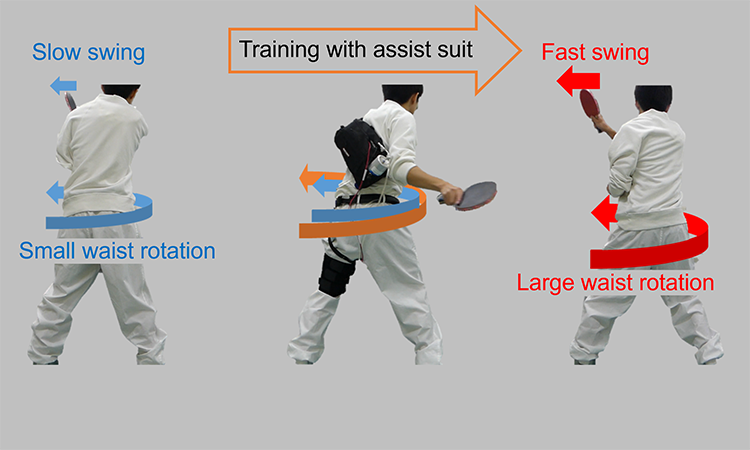
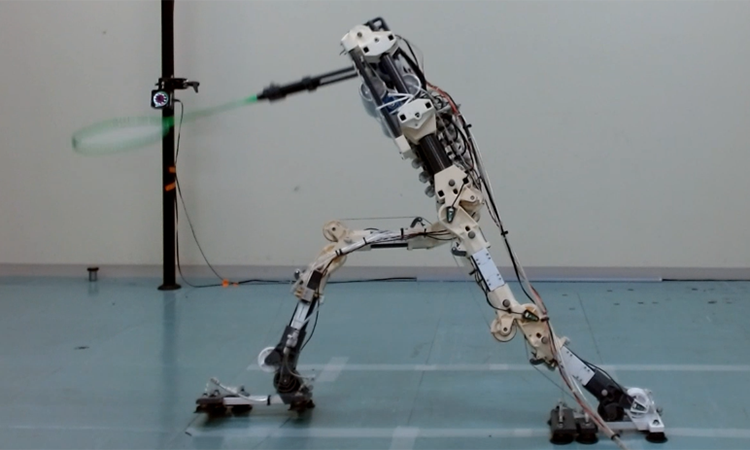
Our research focuses on the development of new robotic devices to promote improved effectiveness in clinical practice, quality of life for users, and sports applications. Robotic technology involves many components such as mechanism, control, sensor and software. We believe that the creative ingenuity is the source for introducing the robotic technology into the human-centered applications beyond the conventional industrial technologies.

