
Research
Power assist robot
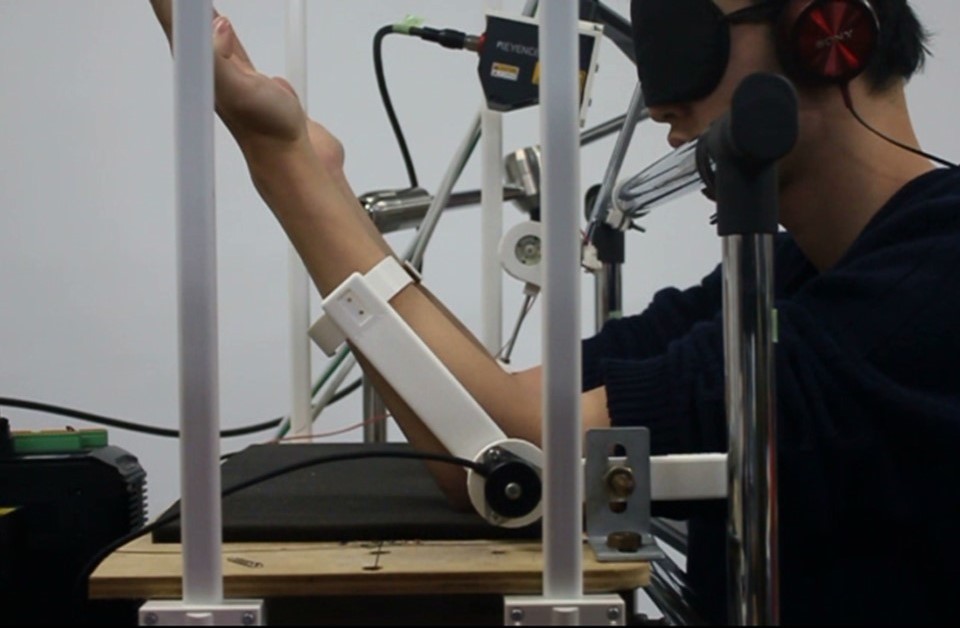
Upper limb assist
The Upper-limb power-assist exoskeleton robot has been developing in order to assist daily activities of physically weak persons such as elderly, disabled, or injured persons. The robot assists the motion of the user based on the user's EMG signals. Tremor suppression methods are also studied.
Lower limb assist
The Lower-limb power-assist exoskeleton robot has been developing in order to assist daily activities of physically weak persons such as elderly, disabled, or injured persons. The robot assists the motion of the user based on the user's EMG signals. Perception-assist is also studied as well as power-assist.
Perception assist
If cognitive functions such as eyesight and hearing deteriorate, there is a risk of encountering an accident due to oversight of danger. Therefore, in our laboratory, we are conducting research on "Perception assist" in which the robot corrects the wearer's movements when dangerous or inappropriate movements are performed.
Upper limb perception assist
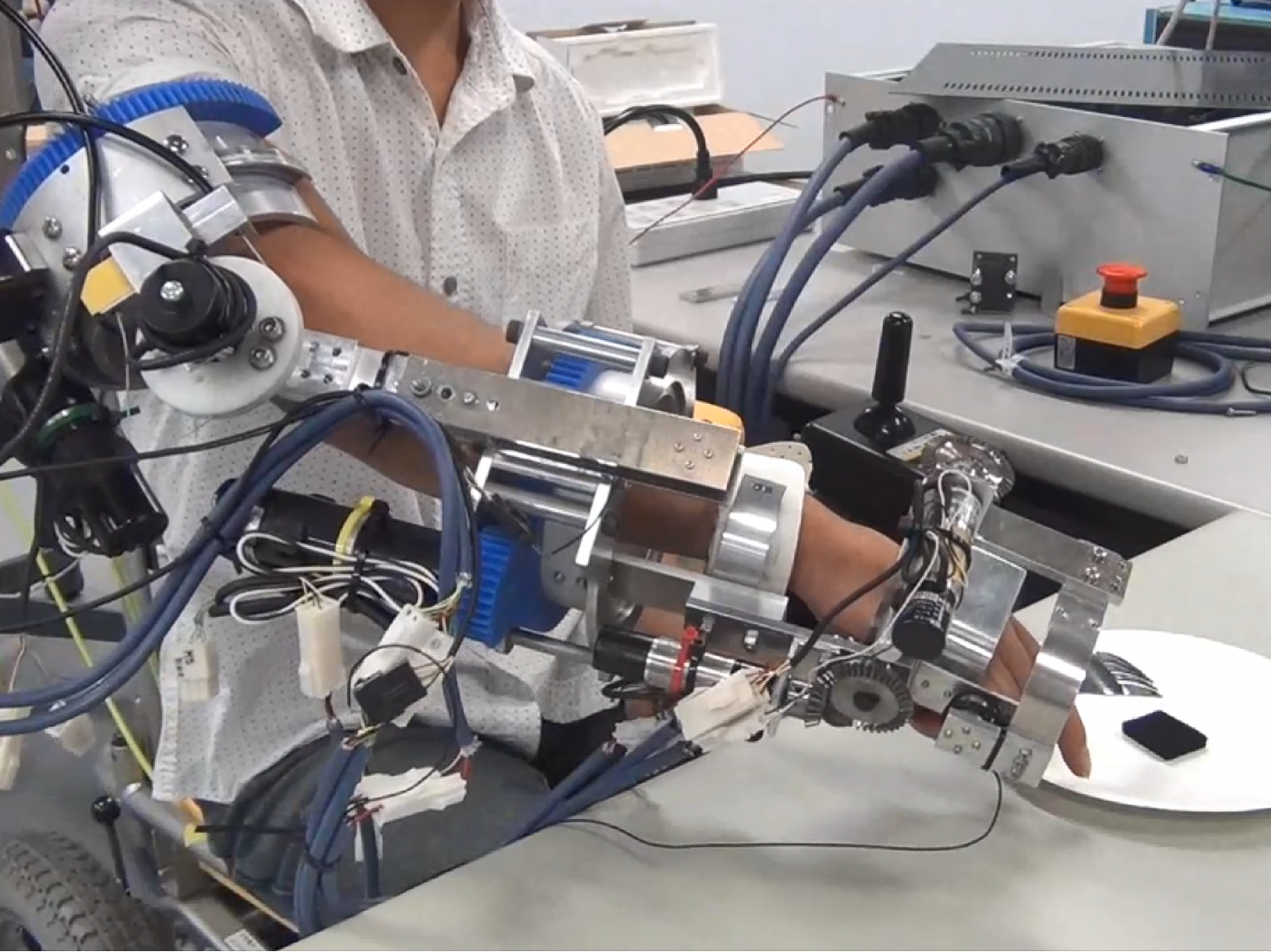
The upper limb exoskeleton robot uses an angle sensor, a stereo camera, and an ultrasonic sensor to detect the movement of the wearer, the surrounding environment, and the distance to the object. By determining the wearer's task based on this information and setting a virtual tunnel according to the task, if the wearer's hand is heading in an unintended direction, motion correction is performed and the target is reached. Guide the wearer's hands.
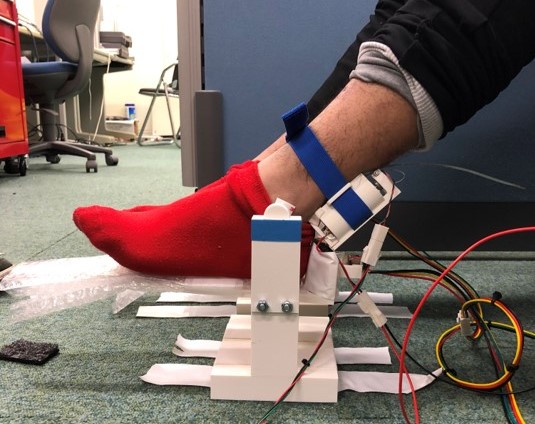
Lower limb perception assist

In perception assist using the lower limb exoskeleton robot, the wearer's movements and the surrounding environment are detected based on the information from the distance measuring sensor and the angle sensor. Then, when a dangerous operation such as stumbling on an obstacle or failing to sit on the chair is detected, the movement of the wearer is corrected to avoid the danger. In addition, in relation to fall prevention by cognitive assistance, we are also conducting research to reproduce falls by applying perturbations to the wearer using a lower limb exoskeleton robot and elucidate the mechanism of falls.
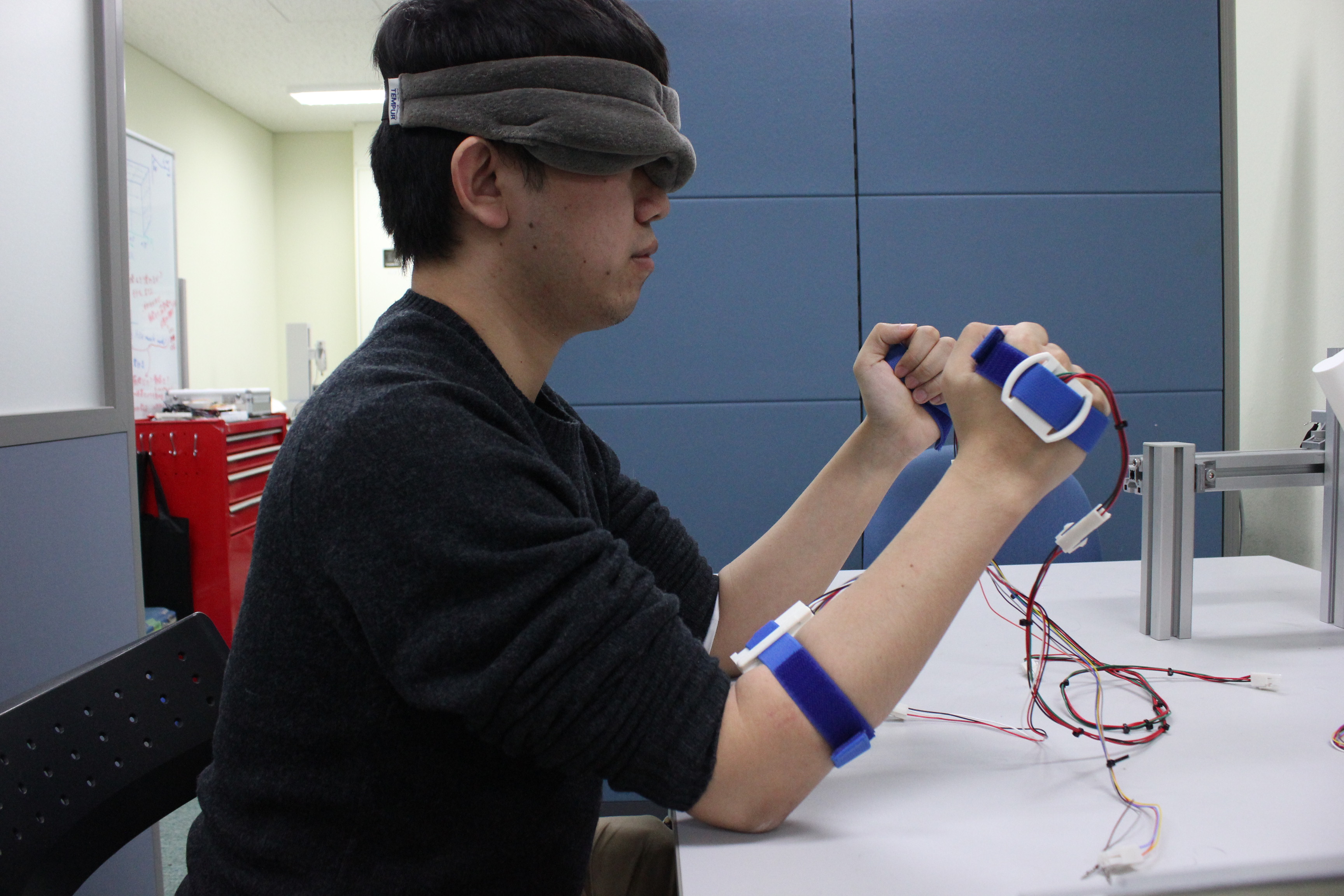
Perception assist using vibration stimulation
We are conducting basic research to elucidate the degree of influence on each joint movement by applying the motion illusion and tonic vibration reflex (TVR) generated by applying vibration stimulation to muscle tendons to each joint movement. In the future, we are aiming to apply it to various fields such as perception assist, rehabilitation, and tremor suppression.
Tremor suppression
Tremor is a rhythmic and oscillating involuntary movement between antagonistic muscles that function complementarily, and is known as unintended trembling. In our laboratory, we are studying a tremor suppression method that generates anti-phase motion of tremor by using tonic vibration reflex (TVR) by mechanical vibration stimulation.
Rehabilitation
The majority of stroke patients suffer from the sequelae of paralysis of the upper and lower limbs. In our laboratory, we are investigating the feasibility of a method using mechanical vibration stimulation as one of the rehabilitation methods.
Rehabilitation using mechanical vibration
Rehabilitation is performed by using the phenomena of "motor illusion" and "tonic vibration reflex (TVR)" caused by vibration stimulation to generate the movement sensation and actual movement of the paralyzed limbs of a stroke patient. We are conducting basic research to do so.
Micro surgical robot
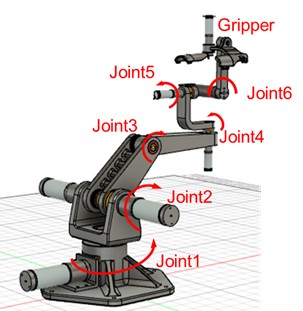
In recent years, surgical robots have been developed to support doctors' surgery. The conventional surgical robot has a demerit that there is no force feedback from the slave hand and the user has to operate by relying only on the image. In order to solve this problem, our laboratory is researching a method for feeding back the force applied to the slave hand to the master hand operated by a person.
Robot artificial limb
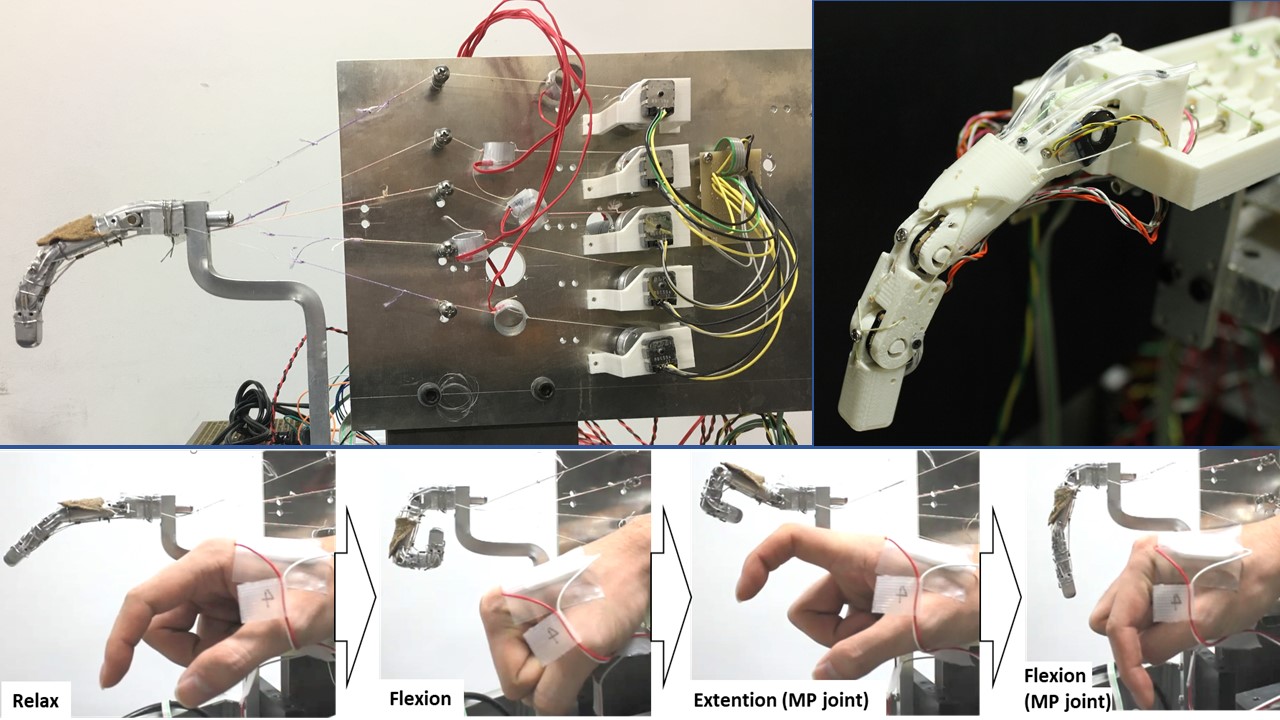
We are developing an intelligent robot artificial limb. By driving a robot hand that anatomically imitates the fingers of the human body using the myoelectric potential of the forearm and the myoelectric potential of the defective muscle estimated by machine learning as command values, it has flexibility and versatility close to that of the human hand.
Sports robot
Skills for maneuvering others in physical interaction tasks against humans
When agents execute motion tasks with others such as nursing care or sports, if they can exploit the motions of others, it is possible to exert more than their own ability and easily perform the tasks. This skill is expected to be useful for the robots physically interacting with humans. In this research, we investigate the way to induce human motions through robot intervention.
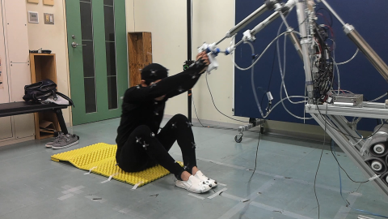
Light-weight powered suit assisting skill acquisition in sport

If a powered suit can assist quick motions such as sports, it is expected to be useful for the training with expanding athletic ability. This research aims to develop a light-weight suit that assists human skill acquisition in sport by using pneumatic actuators.
Development of Humanoid Sports Robot Driven by Pneumatic Actuators
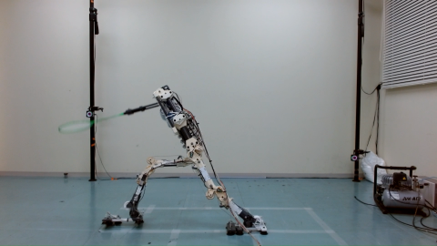
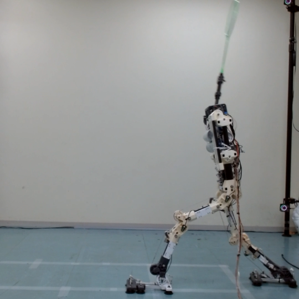
It is useful to introduce a machines for sports training just as a pitching machine. Because humans compete against other humans using their skills, the practice effect for an actual game is expected to be higher if machines are humanoid robots. This study aims to develop a humanoid sports robot using light-weight and compliant pneumatic-drive which is easy to generate dynamic motions.