研究紹介
パワーアシストロボット
上肢アシスト
本研究室で開発している上肢アシストロボットは,高齢者や障害による上肢運動低下をロボット技術により支援し,日常生活を快適に過ごすために開発されています.このロボットは筋電位とよばれる皮膚表面から得られる筋肉の活動を検知して動作します.本研究室では,さらに手指のふるえなどを検知し,ロボットが除去する機能についても研究開発を行っています.
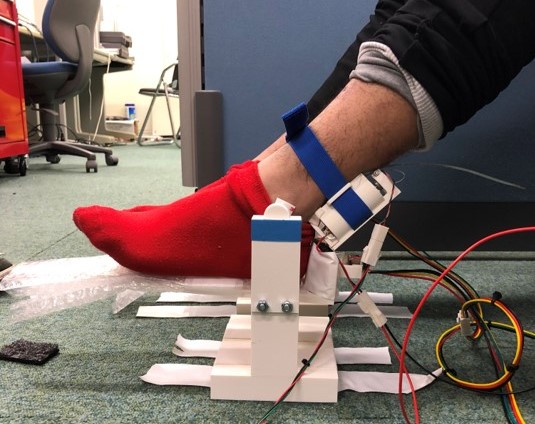
下肢アシスト
歩行をはじめとする高齢者,障害者の日常生活動作支援のために下肢アシストロボットの開発を行っています.歩行をはじめとする様々な動作を可能とすること,また,センサ技術を導入してつまづき,転倒の危険性を事前に検知して予防するための技術開発を行っています.
認知アシスト
視力や聴力などの認知機能が衰えると、危険の見落とし等により、事故に遭遇してしまう危険がある。そのため、本研究室では、危険な動作や不適切な動作を行った際に、ロボットが装着者の動作補正を行う「認知アシスト」についての研究を行っている。
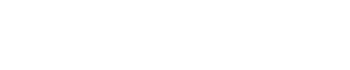
上肢認知アシスト
上肢外骨格ロボットでは、角度センサ、ステレオカメラ、超音波センサを用いることで、装着者の動作、周囲の環境、対象物までの距離を検知する。これらの情報を基に装着者のタスクを判別し、タスクに応じた仮想トンネルを設定することで、装着者の手先が意図しない方向に向かっている場合には、動作補正を行い、目標物まで装着者の手先を誘導する。
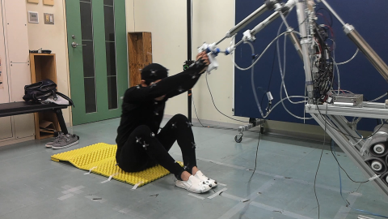
下肢認知アシスト

下肢外骨格ロボットを用いた認知アシストでは、測距センサと角度センサの情報を基に、装着者の動作と周囲の環境を検知する。そして、障害物への躓きや椅子の座り損ないなどの危険操作を検知した場合には、装着者の動作を補正し、危険を回避する。また、認知アシストによる転倒防止に関連し、下肢外骨格ロボットを用いて装着者に摂動を加えることで転倒を再現し、転倒のメカニズムを解明する研究も行っている。
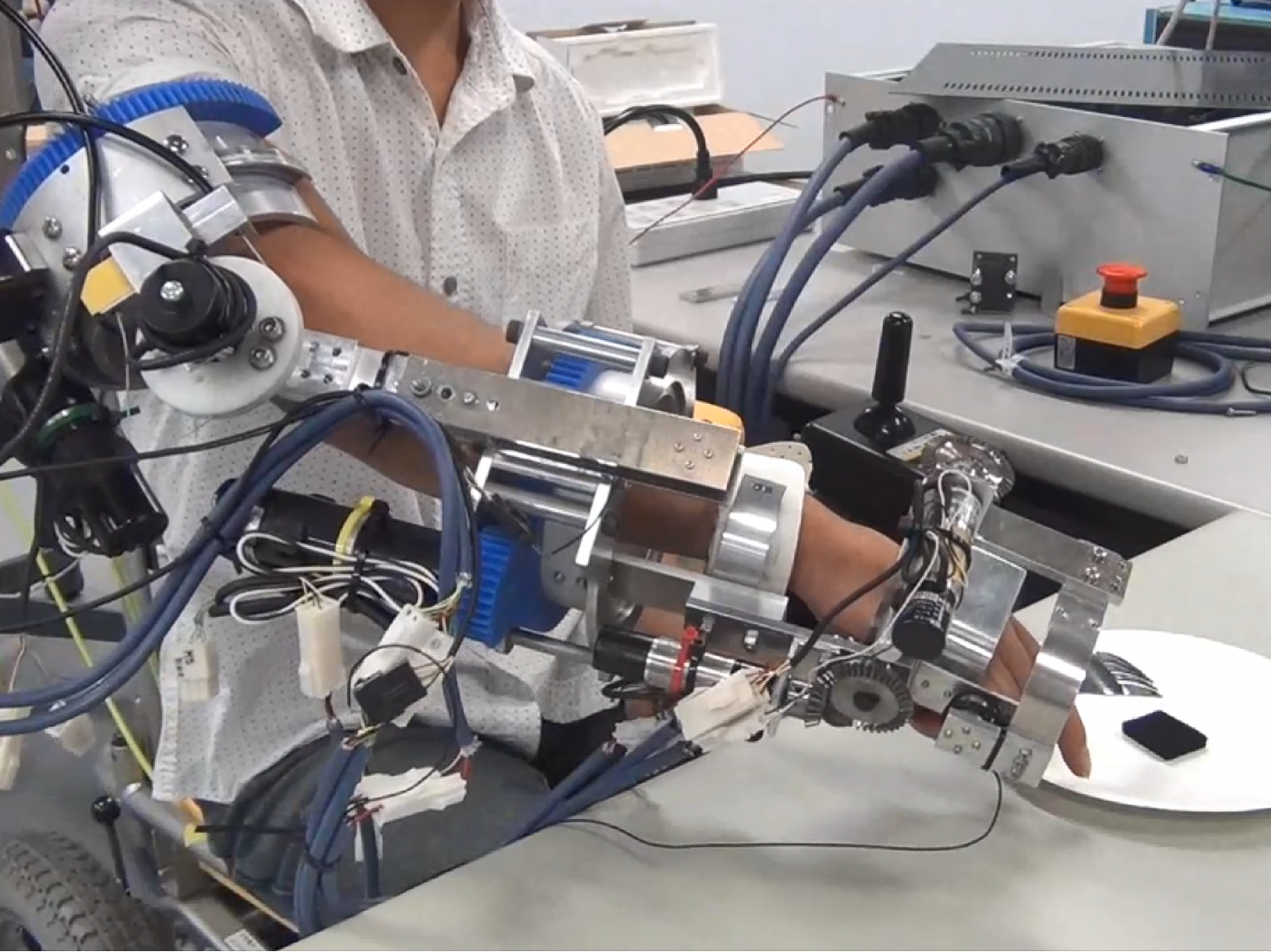
振動刺激を用いた認知アシスト
筋肉の腱に振動刺激を加えることで生じる運動錯覚や緊張性振動反射(TVR)を各関節運動に適用し、その動作にどの程度影響を及ぼすのかを解明する基礎研究を行っている。将来的には、認知アシストやリハビリテーション、振戦抑制など様々な分野への応用を目指している。
振戦抑制
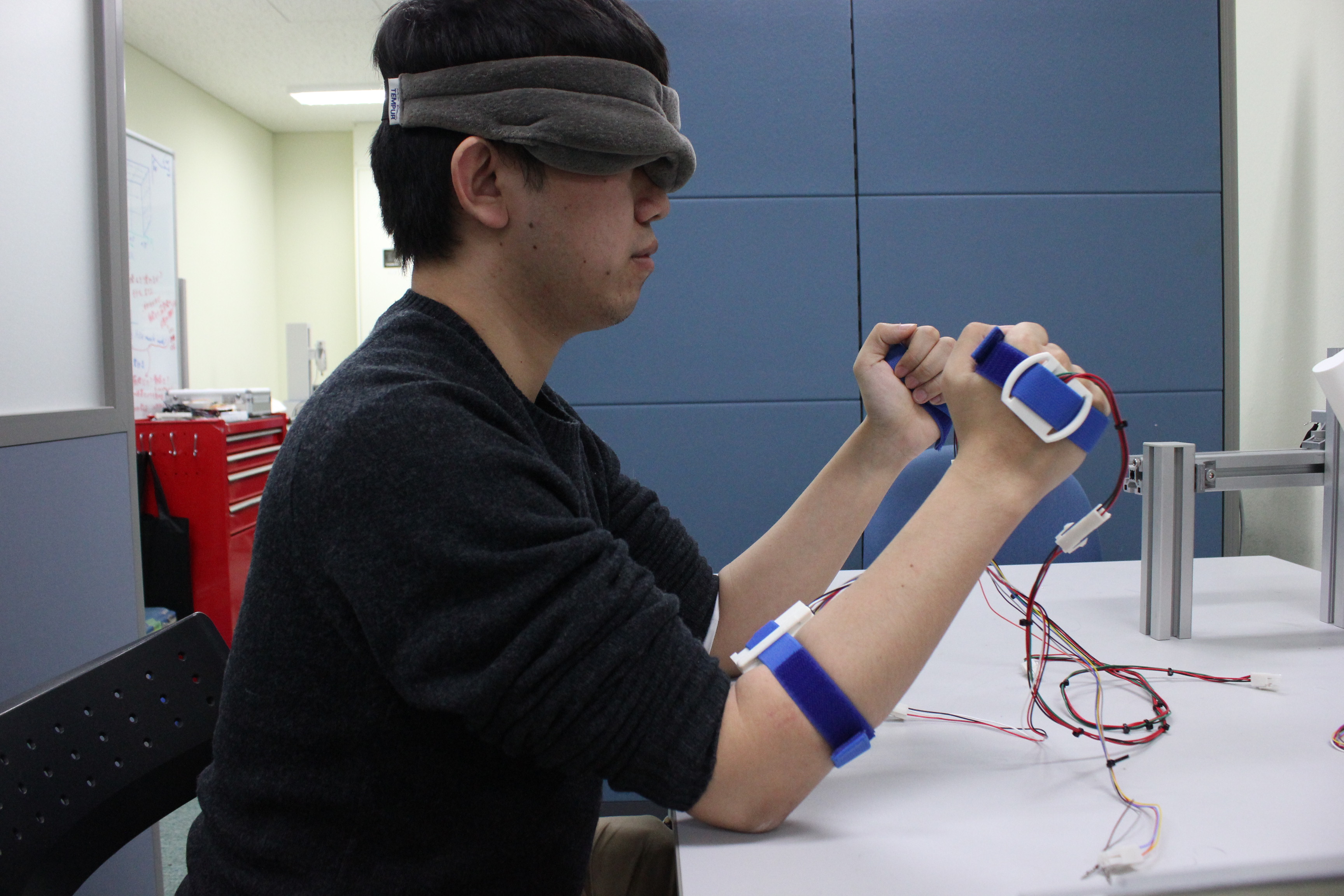
振戦は、相補的に機能する拮抗筋同士の律動的かつ振動的な不随意運動であり、意図しない震えとして知られている。本研究室では振戦抑制手法として,機械的な振動刺激による緊張性振動反射(TVR)を利用して,振戦の逆位相運動を生成させる振戦抑制手法の研究を行っている。
リハビリテーション
大多数の脳卒中患者が後遺症である上肢や下肢の麻痺に苦しんでいる。本研究室では、リハビリテーション手法の一つとして、機械的な振動刺激を用いた手法の実現可能性について検討している。
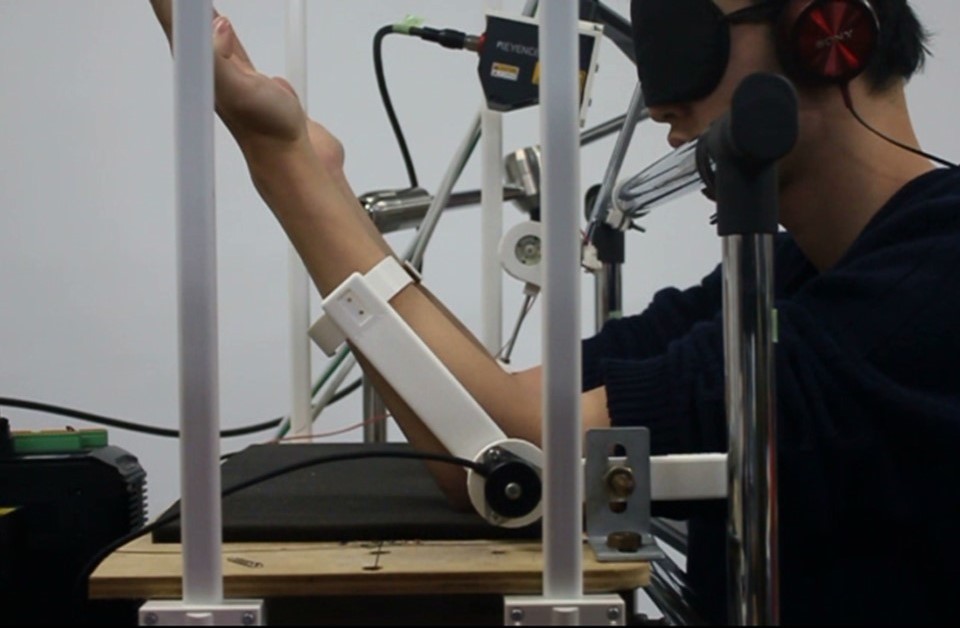
振動刺激を用いたリハビリテーション
振動刺激によって生起される、「運動錯覚」と「緊張性振動反射(TVR)」という現象を利用して、脳卒中患者の麻痺した四肢の動作感覚や、実際の動作を生成することで、リハビリテーションを行うための基礎研究を行っている。
マイクロ手術ロボット
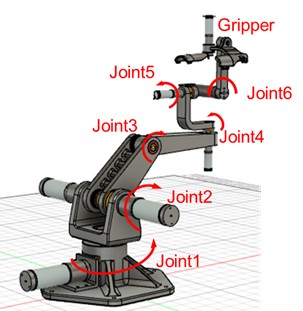
近年、医師の手術を支援するために、手術ロボットの開発が行われている。従来の手術ロボットには、スレーブハンドからの力フィードバックがなく、使用者は映像のみを頼りに操作しなければならないというデメリットがあった。この問題を解決するために、本研究室では、スレーブハンドにかかる力を、人が操作するマスターハンドにフィードバックするための方法について研究している。
ロボット義手
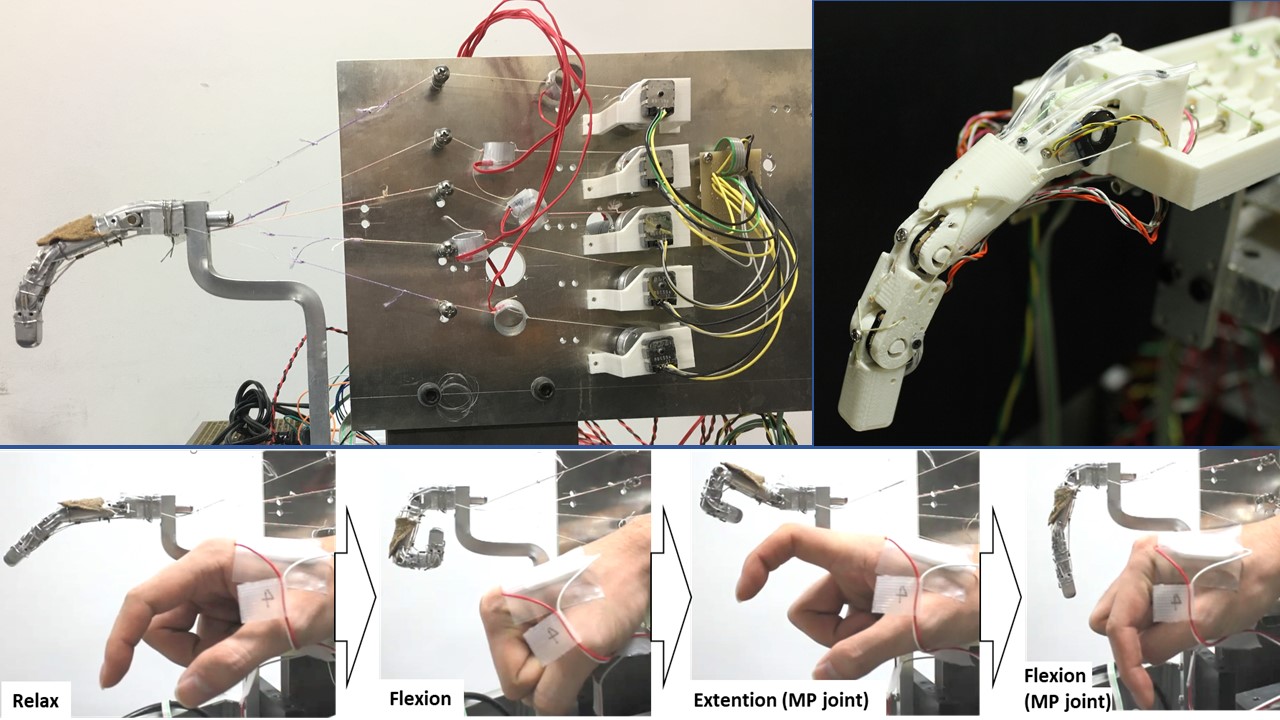
人体の指を解剖学的に模倣したロボットハンドを、前腕の筋電位及び機械学習で推定した欠損筋の筋電位を指令値として駆動することで、人間の手に近い柔軟性、汎用性のあるインテリジェントロボット義手の開発を行っている。
スポーツロボット
ロボットによる人の運動誘導スキル
介護やスポーツ等のように相手がいる状態で運動タスクをする時に、人の性質や相手の運動をうまく活用することができれば、自分の力以上の力を発揮してタスクの遂行を容易にできると考えられ、このスキルは対人ロボットに有用と期待される。そこで、人の運動を引き出すためのロボットの介入方法について調査している。
スポーツ技術習得補助スーツ
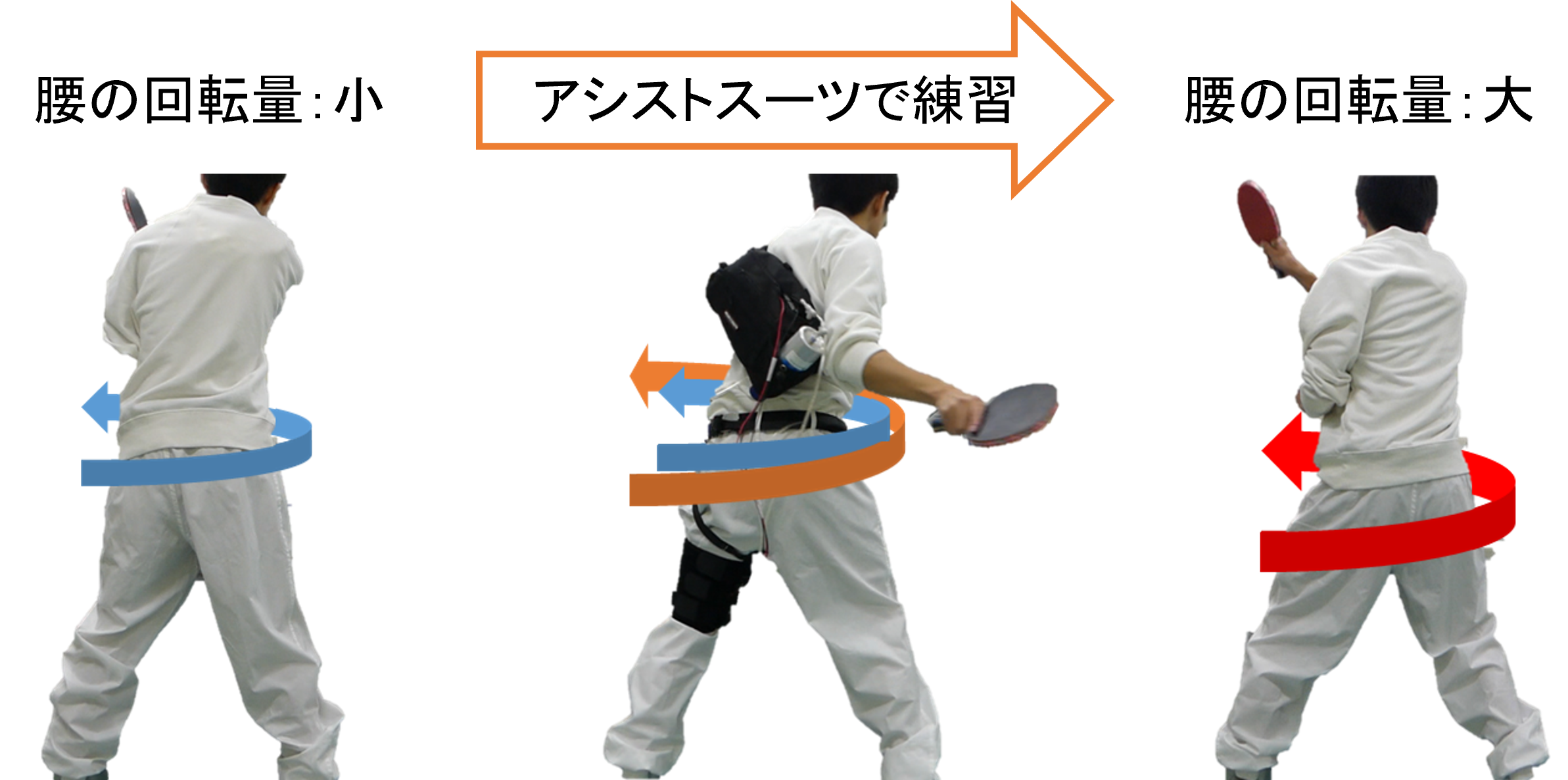
人のスポーツ技術習得の補助のためのパワードスーツを開発している。アクチュエータとしては空気圧人工筋を用いることで軽量で人の動きの阻害が少ないスーツとし、着用後の技術向上を目指している。
俊敏な人型スポーツロボットの開発
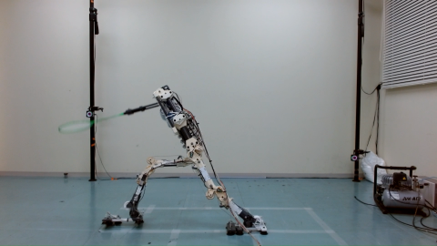
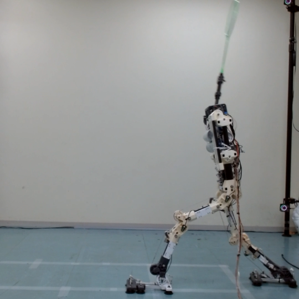
ピッチングマシンなどの機械を導入して練習効果を高めるように、機械をスポーツの練習補助のために用いることは有用と考えられる。スポーツは人が互いにそのスキルを基に競い合うものであることから、機械が人型ロボットであれば、実際のスポーツに近く、より実戦的な練習効果が期待できる。そこで、軽量、柔軟で俊敏な動作の生成が容易な空気圧駆動によりスポーツ動作を行う人型ロボットの開発を進めている。